ตอนนี้เราจะมาพูดถึง recursive filters ซึ่งมีรูปแบบดังนี้

จากสูตรนี้จะเห็นได้ว่าเรามีค่าอยู่เพียงด้านเดียวของค่าปัจจุบัน n และเราใช้ทั้งค่าสัญญาณเก่าและปัจจุบัน u n รวมถึงค่าเอาต์พุตเก่า y n นี่เป็นแนวทางดั้งเดิม และเกิดขึ้นเพราะเรามักจะประมวลผลสัญญาณแบบ real time และไม่สามารถเข้าถึงค่าสัญญาณในอนาคตได้
แต่เมื่อพิจารณาในเชิงพื้นฐานแล้ว เราจะเห็นว่าถ้าเรามี "ค่าอนาคต" การทำนายแบบสองด้านน่าจะแม่นยำกว่ามาก เราจะต้องเผชิญกับระบบสมการเชิงเส้นพร้อมกันในการคำนวณค่า y n ซึ่งไม่ใช่เรื่องน่ากลัวในยุคที่การคำนวณมีราคาถูกแบบนี้ เราจะเก็บข้อสังเกตนี้ไว้ก่อน โดยสังเกตเพียงว่าปัจจุบันนี้เรามักบันทึกสัญญาณลงในเทปหรือสื่ออื่นๆ แล้วค่อยประมวลผลในห้องปฏิบัติการทีหลัง—ดังนั้นเราจึงมีข้อมูลอนาคตอยู่ในมือแล้ว เช่นเดียวกัน ในการประมวลผลภาพ การใช้ recursive digital filter ที่ใช้ข้อมูลจากด้านเดียวของจุดที่กำลังประมวลผลนั้นเป็นเรื่องที่ไม่สมเหตุสมผล เพราะมันจะไม่ใช้ข้อมูลที่เกี่ยวข้องที่มีอยู่
สิ่งต่อไปที่เราเห็นคือ การนำค่าเอาต์พุตเก่ามาใช้เป็นอินพุตใหม่หมายถึงเรามี feedback—และนั่นย่อมหมายถึงคำถามเกี่ยวกับ stability (เสถียรภาพ) โดยอัตโนมัติ นี่คือเงื่อนไขที่เราต้องคอยเฝ้าระวังตลอดเวลาในการออกแบบ recursive filter มันจะจำกัดสิ่งที่เราสามารถทำได้ เสถียรภาพในที่นี้หมายถึงผลกระทบจากสภาวะเริ่มต้นจะไม่ครอบงำผลลัพธ์
เนื่องจากเป็นระบบเชิงเส้น เราจะเห็นว่าไม่ว่าความถี่บริสุทธิ์ใดก็ตามที่เราป้อนเข้าสู่ filter ในสภาวะ steady state เฉพาะ ความถี่นั้นเท่านั้นที่สามารถออกมาได้ แม้ว่าอาจมีการเลื่อนเฟสก็ตาม แต่ transient กลับสามารถมีความถี่อื่นๆ ได้ ซึ่งเกิดจากการแก้สมการผลต่างแบบเอกพันธ์ (homogeneous difference equation) ความจริงก็คือ เรากำลังแก้สมการผลต่างที่มีสัมประสิทธิ์คงที่ โดยที่เทอม u n ทำหน้าที่เป็น "forcing function"—นั่นคือสิ่งที่ recursive filter เป็น และไม่มีอะไรอื่นอีก
ดังนั้นเราจึงสมมติสำหรับสภาวะ steady state (ซึ่งไม่สนใจ transient) ดังนี้

(โดยที่ค่า A อาจเป็นจำนวนเชิงซ้อนเพื่อรองรับการเลื่อนเฟส) และนำไปสู่การแก้หาอัตราส่วนของ A O / A I ซึ่งก็คือ transfer function

นี่คือ rational function ในตัวแปรเชิงซ้อน e iωt \= z ซึ่งต่างจากเดิมที่เรามี polynomial ใน z สำหรับ nonrecursive filters มีทฤษฎีของ อนุกรมฟูเรียร์สำหรับการแทนฟังก์ชัน แต่ยังไม่มีทฤษฎีสำหรับการแทนฟังก์ชันในรูปอัตราส่วนของอนุกรมฟูเรียร์สองชุด (แม้ผมจะไม่เห็นเหตุผลว่าจะมีไม่ได้) ดังนั้นวิธีการออกแบบในปัจจุบันจึงยังไม่เป็นระบบ (อย่างที่ Kaiser ทำไว้สำหรับทฤษฎีการออกแบบ nonrecursive filter) แต่เป็นเพียงชุดของเทคนิคเฉพาะหน้า เราจึงมี Butterworth, Chebyshev สองแบบ (ขึ้นอยู่กับว่าต้องการระลอกคลื่นที่เท่ากันใน pass band หรือ stop band) และ elliptic filters (ชื่อนี้มาจากการใช้ elliptic functions) ซึ่งมีระลอกคลื่นที่เท่ากัน
ผมจะพูดถึงเฉพาะหัวข้อ feedback เท่านั้น เพื่อให้เห็นภาพของปัญหา feedback ผมจะเล่าเรื่องของตัวเองให้ฟัง สมัยก่อนผมเคยเป็นพิธีกรในรายการทีวี tv หกตอน ครึ่งชั่วโมงต่อตอน เกี่ยวกับคอมพิวเตอร์และการคำนวณ ซึ่งถ่ายทำที่ซานฟรานซิสโกเป็นหลัก ผมต้องเดินทางไปที่นั่นบ่อย และติดนิสัยที่จะพักห้องเดิมในโรงแรมเดิม—มันดีที่จะคุ้นเคยกับรายละเอียดของห้องเมื่อคุณเหนื่อยล้าในตอนดึก หรือเมื่อคุณอาจต้องลุกขึ้นมากลางดึก—นี่คือเหตุผลที่อยากได้ห้องเดิม
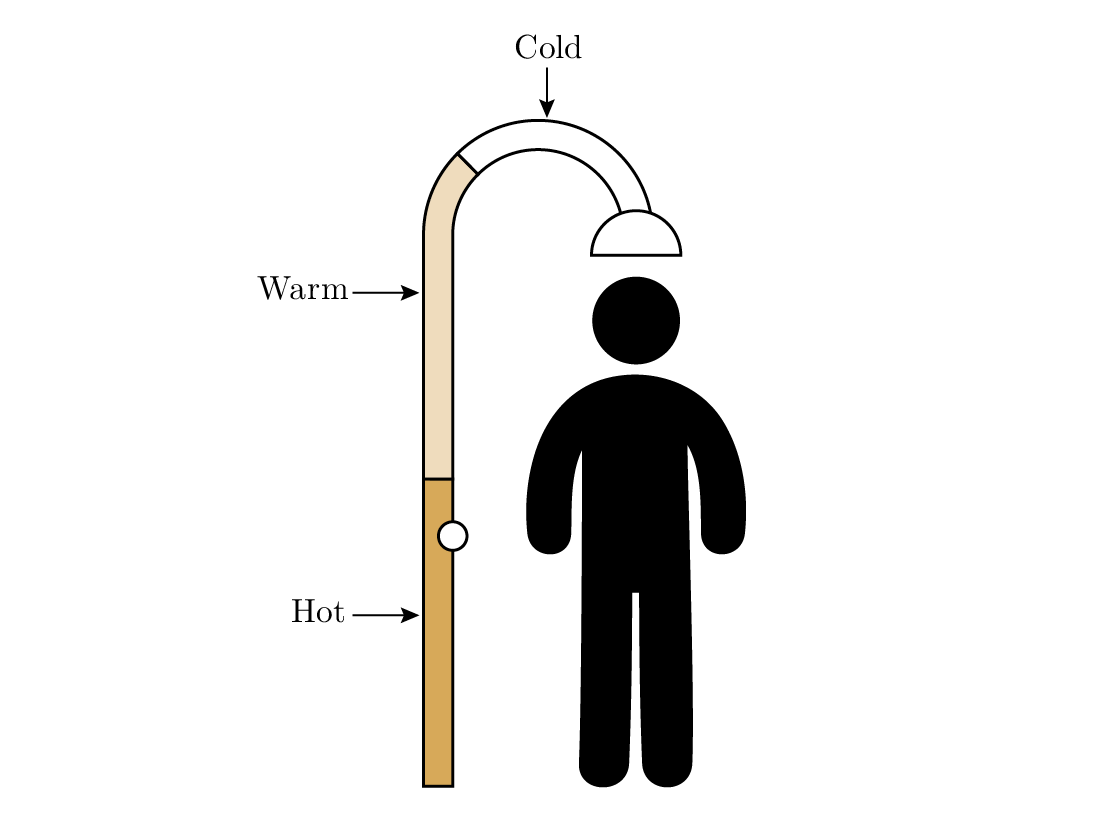
รูปที่ 17.1—อุณหภูมิน้ำในฝักบัว
ช่างประปาได้ติดตั้งท่อน้ำขนาดใหญ่ไว้ในห้องอาบน้ำ รูปที่ 17.1 ผลคือตอนเช้าตอนที่ผมเริ่ม อาบน้ำมันเย็นเกินไป ผมจึงหมุนวาล์วน้ำร้อนเพิ่ม ยังเย็นอยู่ก็เพิ่มอีก ยังเย็นอีกก็เพิ่มอีก และพออุณหภูมิเริ่มพอดีผมก็เข้าไปอาบ แต่แน่นอนว่าน้ำร้อนขึ้นเรื่อยๆ เมื่อน้ำที่ถูกปล่อยก่อนหน้านี้ในที่สุดก็ไหลมาถึงท่อ ผมจึงต้องออกมาแล้วลองปรับวาล์วใหม่ ความล่าช้า ของน้ำร้อนที่มาถึงผมคือปัญหาที่แท้จริง ผมพบว่าตัวเองแม้จะเจอเหตุการณ์แบบนี้หลายครั้ง แต่ก็ยังตกอยู่ในสถานการณ์ hunting แบบคลาสสิกของ instability คุณจะมองว่าการตอบสนองของผมรุนแรงเกินไป (ผมปรับวาล์วแรงเกินไป) หรือการตรวจจับสัญญาณล่าช้าเกินไป (ผมรีบเข้าอาบน้ำเร็วเกินไป) ก็ได้ ผลลัพธ์ระยะยาวก็เหมือนกัน! Instability! ผมไม่เคยชินกับความล่าช้าที่มากขนาดนั้นเลย ทำให้ทุกเช้าผมมีปัญหาเล็กน้อยเป็นอย่างแรก! ในตัวอย่างที่เห็นภาพนี้ คุณจะได้เห็นแก่นแท้ของ instability
ผมจะไม่ลงลึกถึงการออกแบบ recursive digital filters ที่นี่ เพียงแค่บอกว่าผมได้พัฒนาทฤษฎีนี้ขึ้นมาเองจริงๆ ในการจัดการกับสูตร corrector สำหรับการแก้สมการ differential equations แบบตัวเลข รูปแบบของ corrector ในวิธี predictor-corrector คือ

เราจะเห็นว่า u j ของ recursive filter นั้นคืออนุพันธ์ y' n ของเอาต์พุต ซึ่งมาจาก differential equation ใน standard nonrecursive filter ไม่มีเส้นทาง feedback—ค่า y n ที่คำนวณได้จะไม่ปรากฏในด้านขวามืออีก ในสูตรของ differential equation ค่าเหล่านี้ปรากฏในเส้นทาง feedback นี้ และผ่านเทอมอนุพันธ์ก็กลายเป็นเส้นทาง feedback อีกเส้นทางหนึ่ง ซึ่งมักจะไม่เป็นเชิงเส้น ดังนั้น stability จึงเป็นหัวข้อที่ยากกว่าสำหรับ differential equations เมื่อเทียบกับ recursive filters
Recursive filter เหล่านี้มักถูกเรียกว่า "infinite impulse response filters" ( iir ) เพราะการรบกวนเพียงครั้งเดียวจะสะท้อนไปมาใน feedback loop ซึ่งแม้ว่า filter จะมีเสถียรภาพ ก็จะค่อยๆ หายไปแบบ geometric progression ด้วยความที่เป็นผม ผมก็ถามตัวเองว่า ทั้งหมด recursive filters ต้องมีคุณสมบัตินี้หรือไม่ และไม่นานก็พบตัวอย่างที่ขัดแย้ง จริงอยู่ที่มันไม่ใช่ filter ที่คุณจะออกแบบตามปกติ แต่มันแสดงให้เห็นว่าข้ออ้างของพวกนั้นเป็นเพียงผิวเผิน ถ้าคุณถามตัวเองว่า "สิ่งที่ถูกบอกมันจริงหรือไม่" คุณจะพบว่ามันน่าทึ่งมากที่สิ่งที่คุณได้ยินนั้นเป็นเท็จหรือเกือบจะเป็นเท็จ แม้แต่ในสาขาที่พัฒนาแล้ว!
ในบทที่ 26 ผมจะพูดถึงปัญหาการจัดการกับผู้เชี่ยวชาญ ที่นี่คุณเห็นตัวอย่างง่ายๆ ของสิ่งที่เกิดขึ้นบ่อยเกินไป ผู้เชี่ยวชาญเคยถูกสอนอะไรบางอย่างในห้องเรียนตอนที่พวกเขาเป็นนักเรียนและเพิ่งเรียนรู้สิ่งต่างๆ และตอนนั้นพวกเขาไม่ได้ตั้งคำถามกับมัน มันกลายเป็นข้อเท็จจริงที่ยอมรับกัน ซึ่งพวกเขาพูดซ้ำๆ โดยไม่เคยตรวจสอบว่าสิ่งที่พวกเขาพูดนั้นจริงหรือไม่ โดยเฉพาะในสถานการณ์ปัจจุบันของพวกเขา
ตอนนี้ขอผมเล่าอีกเรื่องหนึ่ง ผู้หญิงคนหนึ่งในแผนกคณิตศาสตร์ที่ Bell Telephone Laboratories ไปเต้นรำ square dance กับนักฟิสิกส์คนหนึ่งในงานปาร์ตี้สุดสัปดาห์ และเช้าวันจันทร์ในโถงทางเดิน เธอพูดถึงปัญหาที่เขามีให้ผมฟังแบบ casually เขากำลังวัดจำนวนครั้งของการนับ (counts) ในการทดลองกัมมันตภาพรังสีที่แต่ละระดับพลังงาน ตามที่ผมจำได้คือ 256 ระดับ เรียกว่า "spectrum ของกระบวนการ" ปัญหาของเขาคือเขาต้องการ derivative ของข้อมูล
คุณก็รู้นะ: (ก) จำนวนการนับนิวเคลียร์ที่ระดับพลังงานที่กำหนดย่อมให้กราฟที่ขรุขระ (ข) การหาอนุพันธ์ของกราฟนี้เพื่อหาความชันเฉพาะที่จะเป็นเรื่องที่ยากมาก ยิ่งผมคิดถึงคำพูด casual ของเธอมากเท่าไหร่ ผมก็ยิ่งรู้สึกว่าเขาต้องการคำแนะนำจริงๆ—นั่นหมายถึงผม! ผมหาเขาจากสมุดโทรศัพท์ของ Bell Telephone Laboratories และอธิบายความสนใจของผมและที่มาที่ไป เขาอยากมาที่ออฟฟิศของผมทันที แต่ผมหัวแข็งยืนกรานที่จะไปพบเขาที่ห้องปฏิบัติการของเขา เขาพยายามใช้ห้องทำงานของเขา แต่ผมยืนกรานที่ห้องแล็บ ทำไม? เพราะผมต้องการประเมินความสามารถของเขาและตัดสินว่าปัญหาของเขาคุ้มค่ากับเวลาและความพยายามของผมหรือไม่ เนื่องจากมันดูเหมือนจะเป็นปัญหาที่ยาก เขาผ่านการทดสอบในห้องแล็บด้วยดี—เห็นได้ชัดว่าเขาเป็นนักทดลองที่เก่งมาก เขาทำงานใกล้ขีดจำกัดของสิ่งที่ทำได้—ใช้เวลาหนึ่งสัปดาห์เพื่อเก็บข้อมูล และมีฉนวนกันรังสีจำนวนมากล้อมรอบแหล่งกำเนิดกัมมันตภาพรังสี ดังนั้นเราจึงไม่สามารถทำอะไรได้มากเพื่อให้ได้ข้อมูลที่ดีขึ้น ยิ่งไปกว่านั้น ผมเชื่อมั่นในไม่ช้า แม้จะรู้รายละเอียดน้อย ว่าการทดลองของเขาสำคัญทั้งต่อฟิสิกส์และต่อ Bell Telephone Laboratories ดังนั้นผมจึงรับปัญหานี้มา คติประจำใจ: เท่าที่คุณสามารถเลือกได้ ให้ทำงานที่คุณคิดว่าสำคัญ
แน่นอนว่ามันเป็นปัญหา smoothing และ Kaiser เพิ่งสอนพื้นฐานให้ผม ดังนั้นจะดีกว่าอะไรไปกว่าการพานักทดลองไปหา Kaiser และให้ Kaiser ออกแบบ differentiating filter ที่เหมาะสม? ปัญหาเกิดขึ้นทันที! Kaiser เคยคิดเสมอว่าสัญญาณเป็นฟังก์ชันของเวลา และพื้นที่ใต้กราฟยกกำลังสองคือพลังงาน แต่ที่นี่พลังงานกลับเป็นตัวแปรอิสระ! ผมมีปัญหาซ้ำแล้วซ้ำเล่ากับ Kaiser ในประเด็นนี้ จนกระทั่งผมพูด bluntly ว่า "เอาล่ะ พลังงานของเขาคือเวลา และการวัด หรือ counts คือแรงดันไฟฟ้า" เมื่อถึงตอนนั้น Kaiser ถึงจะทำได้ คำสาปของผู้เชี่ยวชาญ ที่มีมุมมองจำกัดว่าตนเองทำอะไรได้ ผมขอเตือนคุณว่า Kaiser เป็นคนที่มีความสามารถมาก แต่ความเชี่ยวชาญของเขา อย่างที่มักเกิดขึ้นกับผู้เชี่ยวชาญ กลับจำกัดมุมมองของเขา แล้วคุณล่ะ จะทำได้ดีกว่าไหม? ผมหวังว่าเรื่องราวเช่นนี้จะช่วยให้คุณหลีกเลี่ยงหลุมพรางนั้นได้
ดังที่ผมสังเกตไว้ก่อนหน้านี้ โดยปกติสัญญาณจะอยู่ในส่วนล่างของช่วง Nyquist ของ spectrum และ noise จะกระจายตัวทั่วทั้งช่วง Nyquist ดังนั้นเราจึงต้องหาขอบ cutoff ระหว่างสัญญาณที่มีความหมายของนักฟิสิกส์กับ white noise ที่ราบเรียบ จะหามันได้อย่างไร? อันดับแรก ผมขอให้นักฟิสิกส์ให้แบบจำลองทางทฤษฎีที่เขามีในใจแก่ผม ซึ่งก็คือเส้นสเปกตรัมแคบๆ จำนวนมากที่มีรูปทรงเกาส์เซียนวางอยู่บนรูปทรงเกาส์เซียนกว้างๆ (ผมสงสัยว่ารูปทรง Cauchy แต่ก็ไม่เถียงกับเขาเพราะความแตกต่างจะน้อยเกินไป เมื่อพิจารณาจากประเภทข้อมูลที่เรามี) ดังนั้นเราจึงสร้างแบบจำลอง และเขาก็สร้างข้อมูลสังเคราะห์ (synthetic data) จากแบบจำลองนั้น การวิเคราะห์สเปกตรัมอย่างรวดเร็วผ่าน fft แสดงให้เห็นว่าสัญญาณถูกจำกัดอยู่ที่ 1/20 ล่างสุดของช่วง Nyquist ประการที่สอง เราประมวลผลข้อมูลการทดลองของเขาหนึ่งชุด และพบตำแหน่งขอบเดียวกัน! โชคดีเหลือเกิน! (บางทีโชคควรยกให้ความเป็นเลิศของนักทดลอง) ครั้งนี้ทฤษฎีและการปฏิบัติสอดคล้องกัน! เราจะสามารถกำจัด noise ได้ประมาณ 95%
ในที่สุด Kaiser ก็เขียนโปรแกรมให้เขา ซึ่งเมื่อกำหนดตำแหน่ง cutoff edge ตามที่นักทดลองเลือก จะออกแบบ filter ที่เหมาะสม โปรแกรม (1) ออกแบบ differentiating filter ที่เหมาะสม (2) เขียนโปรแกรมเพื่อคำนวณ smoothed output และ (3) ประมวลผลข้อมูลผ่าน filter นี้โดยไม่ต้องมีการแทรกแซงจากนักฟิสิกส์
ต่อมาผมจับได้ว่านักฟิสิกส์ปรับ cutoff edge สำหรับส่วนต่างๆ ของข้อมูลพลังงานในชุดข้อมูลเดียวกัน และต้องเตือนเขาว่ามีสิ่งที่เรียกว่า "degrees of freedom" และสิ่งที่เขาทำนั้นไม่ใช่การประมวลผลข้อมูลที่ซื่อสัตย์ ผมมีปัญหามากกว่านั้นอีก เมื่อทุกอย่างกำลังไปได้สวย ในการโน้มน้าวให้เขาใช้รากที่สองของจำนวน counts เพื่อให้ได้ประโยชน์สูงสุดจากข้อมูลที่มีราคาแพงของเขา เนื่องจากค่าพวกนี้มีความแปรปรวนเท่ากัน แต่ในที่สุดเขาก็เข้าใจและทำตาม เขาและ Kaiser เขียนบทความคลาสสิกในสาขานี้ เพราะมันเปิดประตูสู่สิ่งใหม่ๆ ที่สามารถทำได้
ส่วน contribution ของผม? หลักๆ คือ การระบุปัญหาตั้งแต่แรก จากนั้นนำคนที่ใช่มาพบกัน แล้วคอย monitor Kaiser ให้เขาเข้าใจว่าการกรอง (filtering) ไม่จำเป็นต้องเกี่ยวข้องกับสัญญาณเวลาเท่านั้น และสุดท้าย เตือนพวกเขาถึงสิ่งที่พวกเขารู้จากสถิติ (หรือควรรู้และอาจจะไม่รู้)
จากประสบการณ์ของผม บทบาทนี้ดูเหมือนจะจำเป็นมากขึ้นเรื่อยๆ เมื่อคนเรามีความเชี่ยวชาญเฉพาะทางสูงขึ้นและแคบลงเรื่อยๆ ใครสักคนต้องรักษามุมมองที่กว้างและทำให้แน่ใจว่าสิ่งต่างๆ ถูกทำอย่างซื่อสัตย์ ผมคิดว่าผมได้บทบาทนี้มาจากการศึกษาที่ยาวนานภายใต้ John Tukey รวมถึงพื้นฐานที่ดีในรูปแบบของเครื่องมือสากลของวิทยาศาสตร์ นั่นคือคณิตศาสตร์ ผมจะพูดถึงธรรมชาติของคณิตศาสตร์ในบทที่ 23
การประมวลผลสัญญาณส่วนใหญ่ทำกับสัญญาณเวลาจริงๆ แต่ digital filters ส่วนใหญ่คงถูกออกแบบสำหรับงานศึกษาเฉพาะกิจขนาดเล็ก ไม่จำเป็นต้องเป็นสัญญาณเวลาเสมอไป นี่คือจุดที่ผมขอให้คุณสนใจในอนาคต สมมติว่าเมื่อคุณอยู่บนตำแหน่งสูงสุดในการบริหาร และคุณสนใจข้อมูลบางอย่างที่แสดงบันทึกในอดีตของค่าใช้จ่ายสัมพัทธ์ระหว่างกำลังคนและอุปกรณ์ มันจะมี noise แน่นอน แต่คุณอยากเข้าใจในเชิงพื้นฐานว่าเกิดอะไรขึ้นในองค์กร—แนวโน้มระยะยาวอะไรที่กำลังเกิดขึ้นช้าจนคนแทบไม่รู้สึกถึงมัน แต่ยังคงสำคัญอย่างยิ่งที่ต้องเข้าใจหากคุณต้องการบริหารจัดการได้ดี คุณจะต้องใช้ digital filter เพื่อปรับเรียบข้อมูลเพื่อให้เห็นแนวโน้ม ถ้ามันมีอยู่จริง คุณไม่อยากหาแนวโน้มที่ไม่มีอยู่จริง แต่ถ้ามีคุณก็อยากรู้ว่ามันเป็นอย่างไรมาเพื่อจะได้คาดการณ์ว่ามันน่าจะเป็นอย่างไรในอนาคตอันใกล้ ที่จริงแล้วคุณอาจต้องการสังเกต ถ้าข้อมูลรองรับได้ ว่ามีการเปลี่ยนแปลงของความชันของแนวโน้มหรือไม่ สัญญาณบางอย่าง เช่น อัตราส่วนของอำนาจการยิงต่อระวางบรรทุกของเรือรบที่สอดคล้องกัน ไม่จำเป็นต้องเกี่ยวข้องกับเวลาเลย แต่จะบอกคุณเกี่ยวกับสถานะปัจจุบันของกองทัพเรือ แน่นอน คุณยังสามารถศึกษาความสัมพันธ์เป็นฟังก์ชันของเวลาได้อีกด้วย
ผมขอเสนออย่างยิ่งว่าในช่วงสูงสุดของอาชีพการงาน คุณจะสามารถใช้ digital filtering ระดับต่ำกับสัญญาณต่างๆ ได้มากมาย ไม่ว่าจะเป็นสัญญาณเวลาหรือไม่ก็ตาม เพื่อให้คุณสามารถบริหารจัดการสิ่งต่างๆ ได้ดีขึ้น ดังนั้นผมจึงขออ้างว่า คุณจะออกแบบ filter สำหรับงานแปลกๆ เหล่านี้มากกว่าสำหรับการลดข้อมูลเรดาร์และงานมาตรฐานอื่นๆ เสียอีก โดยปกติแล้วใน application ใหม่ๆ ของความรู้ที่คุณคาดหวังผลประโยชน์ที่ยิ่งใหญ่ที่สุดได้
ผมขอให้คำเตือนบางประการเกี่ยวกับการใช้เครื่องมือทางปัญญาในทางที่ผิด และผมจะพูดในบทที่ 27 เกี่ยวกับหัวข้อที่ใกล้เคียงกับสถิติมากกว่าที่ผมมีเวลาพูดถึงตอนนี้ การวิเคราะห์ฟูเรียร์ (Fourier analysis) นัยถึงความเป็นเชิงเส้นของแบบจำลองพื้นฐาน คุณสามารถใช้มันในสถานการณ์ที่ไม่เชิงเส้นเล็กน้อยได้ แต่บ่อยครั้งที่การวิเคราะห์ฟูเรียร์ที่ซับซ้อนล้มเหลวเพราะปรากฏการณ์พื้นฐานนั้นไม่เชิงเส้นเกินไป ผมเคยเห็นเงินหลายล้านดอลลาร์ไหลลงท่อระบายน้ำในขณะที่มันค่อนข้างชัดเจนสำหรับบุคคลภายนอกว่าความไม่เป็นเชิงเส้นจะทำลายการวิเคราะห์เชิงเส้นทั้งหมดที่พวกเขาทำได้ด้วยวิธี Fourier function เมื่อชี้ให้พวกเขาเห็น คำตอบของพวกเขาดูเหมือนจะเป็นว่าพวกเขาไม่รู้จะทำอะไรอื่น ก็เลยทำสิ่งผิดต่อไป! ผมไม่ได้พูดเกินจริงนะ
แล้ว nonlinear filters ล่ะ? ความเป็นไปได้ไม่มีที่สิ้นสุด และแน่นอนว่าต้องขึ้นอยู่กับปัญหาเฉพาะที่คุณมีอยู่ ผมจะพูดถึงเพียงอันเดียวคือ running median filter จากชุดข้อมูลที่กำหนด คุณคำนวณ running median เป็นเอาต์พุต ลองคิดดูว่ามันจะทำงานอย่างไรในทางปฏิบัติ อย่างแรก คุณจะเห็นว่ามันมีแนวโน้มที่จะปรับเรียบ noise เฉพาะที่—median จะใกล้เคียงกับค่าเฉลี่ย ซึ่งก็คือการ fit เส้นตรงด้วยกำลังสองน้อยที่สุดที่ใช้สำหรับการปรับเรียบเฉพาะที่ แต่ที่จุดที่ไม่ต่อเนื่อง (discontinuity) รูปที่ 17.2 สมมติว่าเรามีเส้นโค้งระดับราบแล้วลดลงสู่เส้นโค้งระดับราบอีกเส้นหนึ่ง filter จะทำอย่างไร? ด้วยจำนวนเทอมที่เป็นเลขคี่ใน median filter คุณจะเห็นว่าเอาต์พุตจะคงที่ระดับสูงจนกว่าคุณจะมีจุดมากกว่าครึ่งหนึ่งอยู่ที่ระดับต่ำกว่า จากนั้นมันจะ กระโดด ไปยังระดับต่ำกว่า มันจะติดตาม discontinuity ได้ค่อนข้างดี และจะไม่พยายามปรับให้เรียบจนหายไป! สำหรับบางสถานการณ์ นั่นคือประเภทของการกรองที่คุณต้องการ—กำจัด noise เฉพาะที่ แต่ไม่สูญเสียการเปลี่ยนแปลงอย่างฉับพลันในสถานะของระบบที่กำลังศึกษา
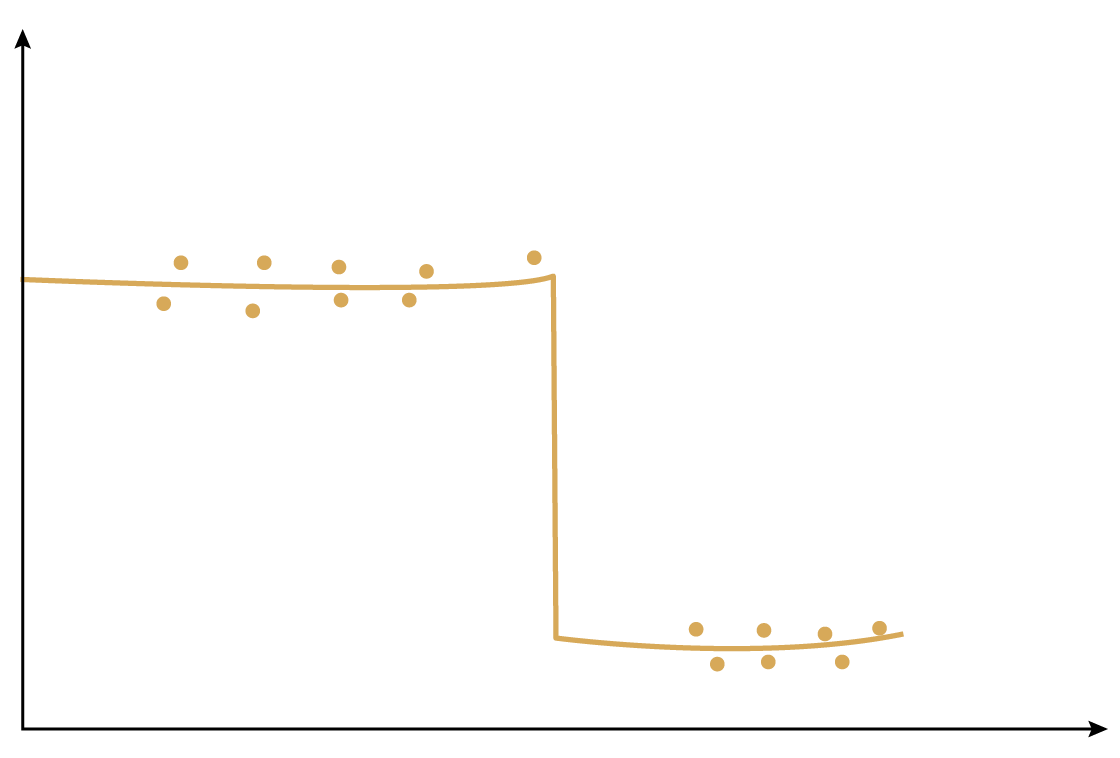
รูปที่ 17.2—Median filter
ผมขอย้ำอีกครั้ง Fourier analysis เป็นเชิงเส้น และมี nonlinear filters มากมาย แต่ทฤษฎียังไม่ได้รับการพัฒนามากนักนอกเหนือจาก running median Kalman filters เป็นอีกตัวอย่างหนึ่งของการใช้ partially nonlinear filters โดยส่วนที่ไม่เป็นเชิงเส้นคือการ "ปรับตัว" เข้ากับสัญญาณ
ข้อสังเกตพื้นฐานสุดท้ายที่ผมได้เรียนรู้ขณะพยายามเรียนรู้ digital filters วันหนึ่งขณะอ่านหนังสือเกี่ยวกับ Fourier integrals ผมพบว่ามีทฤษฎีบทที่กล่าวว่าความแปรปรวน (variability) ของฟังก์ชันคูณกับความแปรปรวนของ transform ของมันต้องมากกว่าค่าคงที่ค่าหนึ่ง ผมพูดกับตัวเองว่า "นี่มันอะไรอื่นนอกจาก uncertainty principle ที่มีชื่อเสียงของกลศาสตร์ควอนตัม?" ใช่แล้ว ทุกทฤษฎีเชิงเส้นต้องมี uncertainty principle ที่เกี่ยวข้องกับ conjugate variables เมื่อคุณใช้แนวทางเชิงเส้น และ qm อ้างถึงการบวกกันแบบสมบูรณ์ของ eigenstates คุณก็จะต้องพบ uncertainty principle Linear time invariance นำไปสู่ eigenfunctions e iωt โดยอัตโนมัติ ซึ่งนำไปสู่ Fourier integral ทันที และ Fourier integrals ก็มี uncertainty principle มันเหมือนกับคุณใส่แว่นตาสีฟ้า ไม่ว่าคุณจะมองที่ไหน คุณก็จะเห็นทุกอย่างเป็นสีฟ้า! ดังนั้นคุณจึงไม่แน่ใจว่า uncertainty principle ที่มีชื่อเสียงของ qm มีอยู่จริงหรือไม่ มันอาจเป็นเพียงผลของสมมติฐานเชิงเส้นเท่านั้น มากกว่าที่คนส่วนใหญ่อยากจะเชื่อ สิ่งที่เราเห็นนั้นขึ้นอยู่กับว่าเราเข้าใกล้ปัญหาอย่างไร! บ่อยครั้งเกินไปที่เราเห็นสิ่งที่เราอยากเห็น ดังนั้นคุณจึงต้องมีเจตคติทางวิทยาศาสตร์ในการสงสัยความเชื่อของตนเองอย่างมีสติ
เพื่อแสดงให้เห็นประเด็นนี้ ผมจะเล่าเรื่อง Eddington เรื่องชาวประมงอีกครั้ง พวกเขาใช้แหจับปลา และเมื่อตรวจสอบขนาดของปลาที่จับได้ พวกเขาก็สรุปว่าปลาในทะเลมีขนาดต่ำสุดที่แน่นอน
โดยสรุป ถ้าคุณไม่สงสัยกฎเกณฑ์ที่ยอมรับกันในบางครั้ง คุณก็ไม่น่าจะเป็นผู้นำเข้าไปในพื้นที่ใหม่ๆ ถ้าคุณสงสัยมากเกินไป คุณก็จะเป็นอัมพาตและไม่ได้ทำอะไรเลย เมื่อไหร่ควรสงสัย เมื่อไหร่ควรตรวจสอบพื้นฐาน เมื่อไหร่ควรคิดเอง และเมื่อไหร่ควรเดินหน้าต่อและยอมรับสิ่งต่างๆ ตามที่เป็น มันเป็นเรื่องของสไตล์ และผมไม่สามารถให้สูตรสำเร็จรูปง่ายๆ ในการตัดสินใจได้ คุณต้อง เรียนรู้จากการศึกษาชีวิตของคุณเอง ความก้าวหน้าครั้งใหญ่มักมาจากการเปลี่ยนแปลงครั้งสำคัญในความเชื่อพื้นฐานของสาขาหนึ่ง เมื่อความรู้ของเราก้าวหน้าไป ความสมดุลระหว่างแง่มุมต่างๆ ของการทำวิจัยก็เปลี่ยนไป เช่นเดียวกัน เมื่อคุณยังเด็ก serendipity (การพบเจอสิ่งดีๆ โดยบังเอิญ) มีเวลานานที่จะให้ผลตอบแทน แต่เมื่อคุณแก่ มันมีเวลาไม่มาก และคุณควรมุ่งเน้นไปที่สิ่งที่อยู่ตรงหน้ามากกว่า